
Back in 2022, I started creating extensions for DXLog to do interesting things that I wanted but DXLog couldn’t or wouldn’t do. I have started contributing the code for some of the to the main code base such as the Operator and Azimuth Statistics.
I have a few others which I am integrating when I get the time but I present one which I have been using for some time which might never make the main product.
It allows you to have a new window called Exchange Info. This window shows the operator what they should be saying to the other station. It is ideal when you can’t remember your locator or you have some new operators joining you for the contest.
I think I have covered most of the dynamic data possible but if something doesn’t work right, reach out and I will attempt to fix it.
It works by parsing the contents of Message2.
It is now available as part of DXLog core from version 2.6.3. If you had it loaded via the DLL I distributed, please remove it.
You can download the latest version of the DLL at any time from https://drive.google.com/file/d/1DvHVYr3wCg41RhWDbNZbyCsHiAA2bfQJ/view?usp=drive_link
To use it, download it and copy the DLL to a folder called CustomForms (in %APPDATA%\DXLog.net folder) and restart DXLog. You may need to create the folder.
If you like it, drop me an email and let me know.







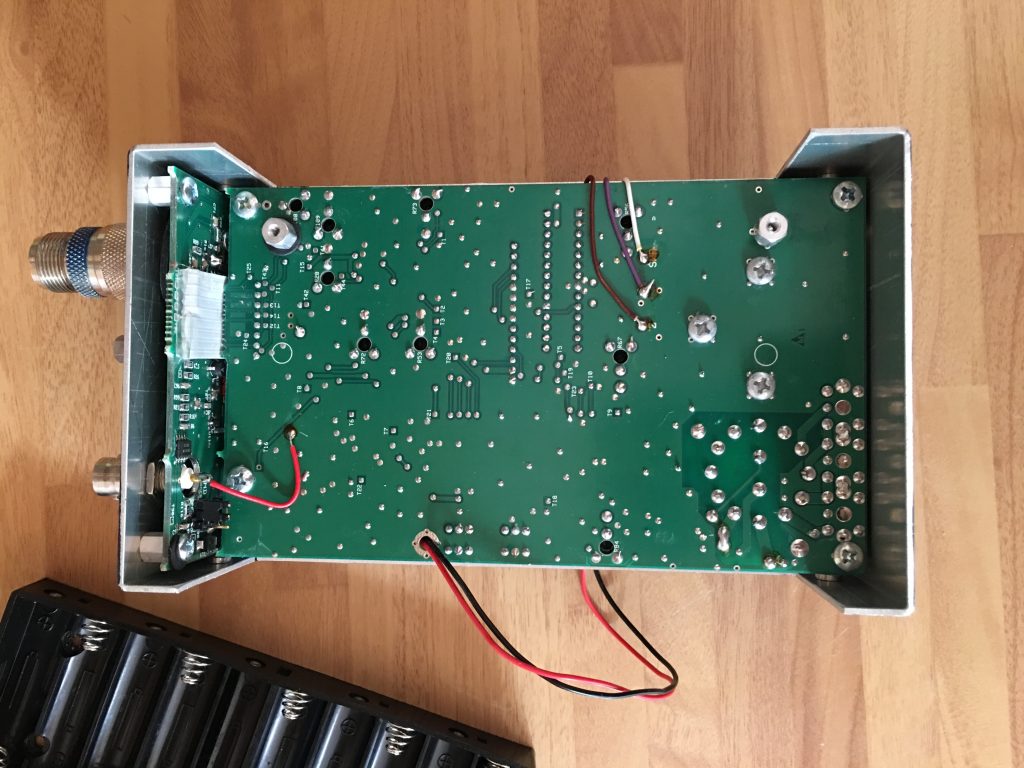
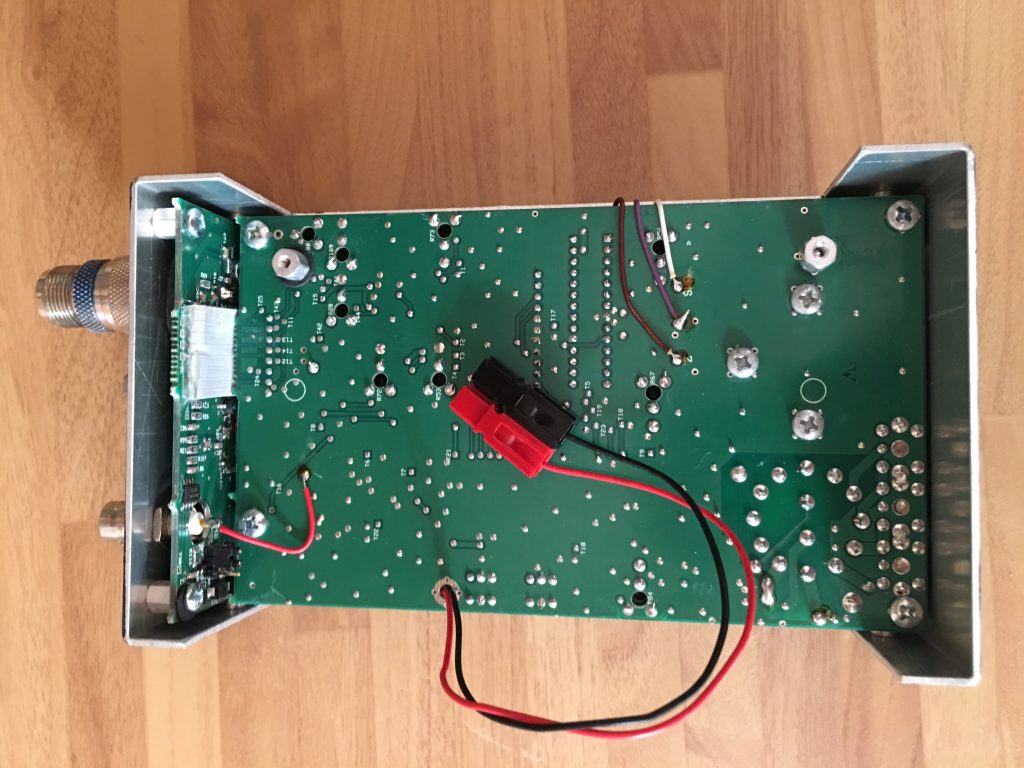
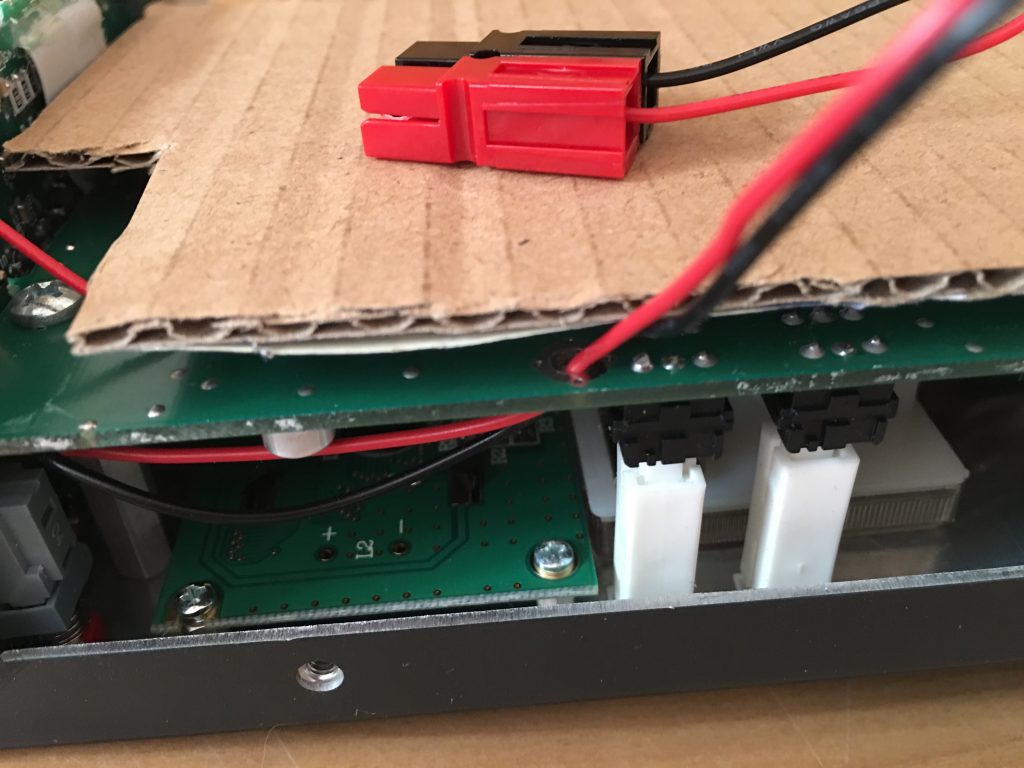
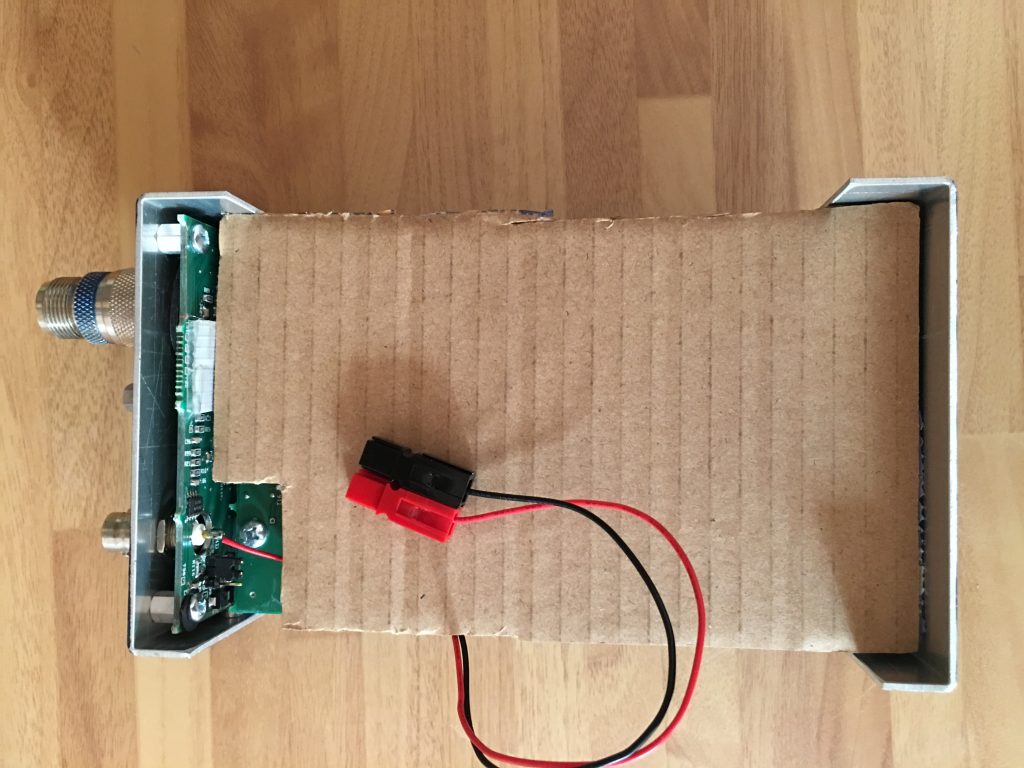


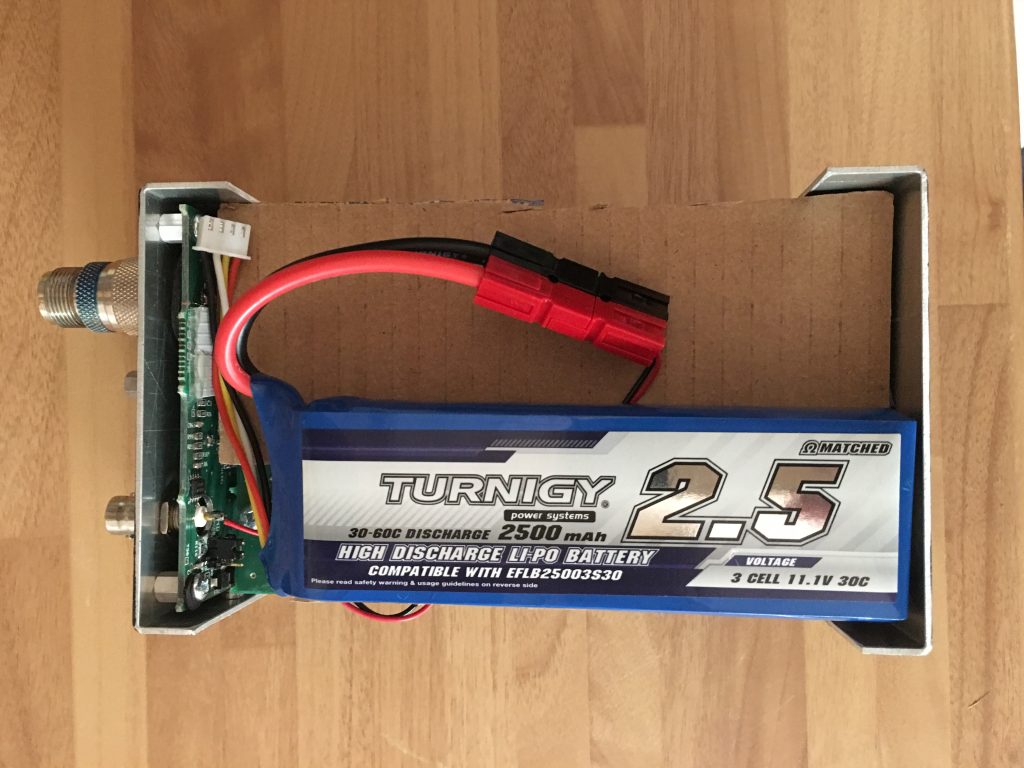

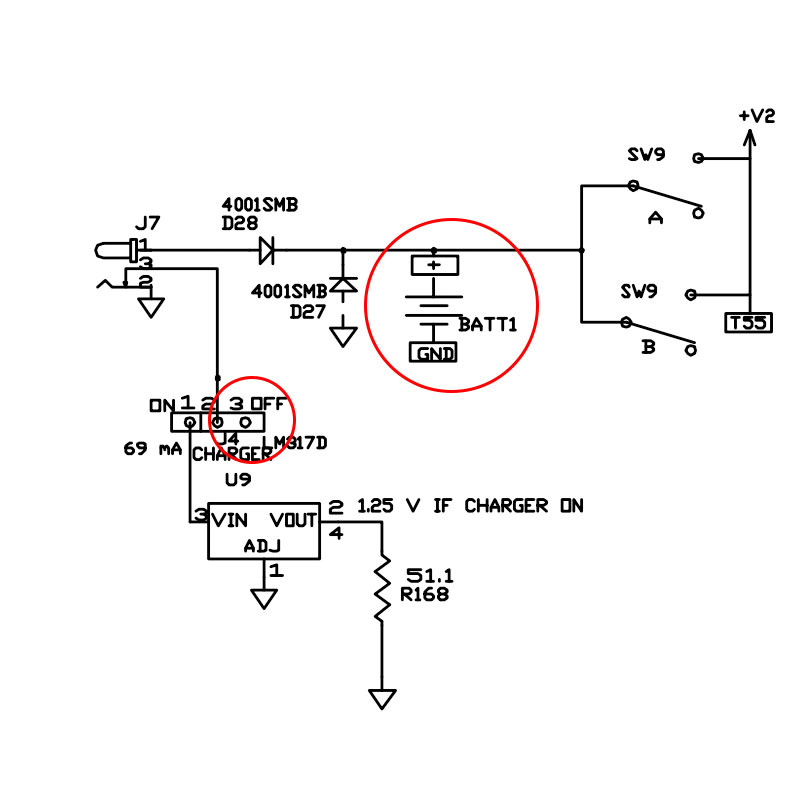
 I have updated the instructions to the LiPo Powerpole Distribution project to include some possible modifications you may wish to make.
I have updated the instructions to the LiPo Powerpole Distribution project to include some possible modifications you may wish to make.